Getting Started¶
This repository code and its documentation cover the techniques for modeling, generating, deploying, managing, and analyzing distributed CPS applications that use ROS. Within ROSMOD, there are two types of users: 1) the users who develop the models, software, and systems for distributed CPS applications, and 2) the users who manage, extend, and deploy ROSMOD and its associated modeling language.
As an overview, ROSMOD provides a semantic backplane for developing models of distributed CPS applications. In this way, ROSMOD enables the development of plugins which act on any model developed using its meta-model. Examples of such plugins include the software generators and compilers associated with ROSMOD, as well as the deployment managmenet plugins which handle constraint checking, deployment initialization, deployment monitoring, deployment teardown, and result plotting.
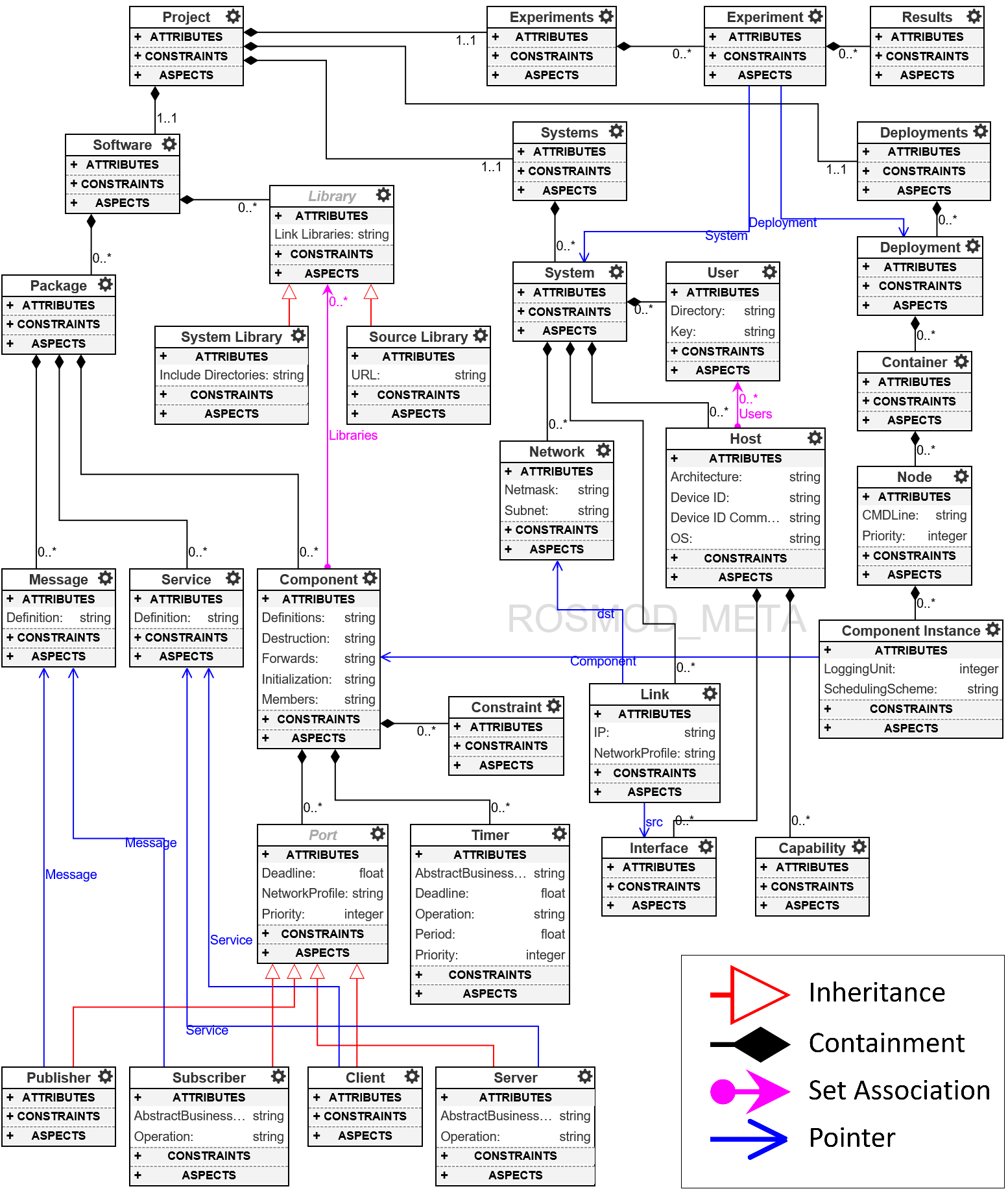
Figure 1: ROSMOD Meta-Model.
- Using ROSMOD : for readers interested in using ROSMOD-GUI; provides an explanation the interfaces provided by the tools and walks through some examples to demonstrate how they can be used. This section is for people who want to use a pre-existing ROSMOD server.
- Deploying ROSMOD : for readers interested in extending this work or learning more about the complete implementation of ROSMOD; provides a launching point which directs them to the APIs that have been developed for interfacing between the code’s modules. Also explains what WebGME is and how to run a local or cloud-based server of ROSMOD / WebGME.